=BVSOLVE(eqns, vars, bcs, domain, [options])
Use BVSOLVE to solve a boundary-value ODE or DAE system in the form:
(the system can have as many equations as needed)
To complete description of the problem, boundary conditions implicating the differential variables are required. General nonlinear boundary conditions can be specified at any location within the the system spatial domain [xs, xe].
eqns a reference to the system formulas (f1, f2,..,g1,..).
vars a reference to the system variables in the following order (x, y1, y2,.. ).
Optional. You can define starting guess for (y1, y2,.. ). The guess can be a constant or a function of x.
Variables order must be consistent with equations order. For example, given this order (x, y1, y2,.. ) implies dy1/dx = f1, dy2/dx = f2 and so forth.
Enter as a reference to a range. for Example, X1:X3. If your variables are not in a
contiguous range, say X1, Y1, Y2, you can combine them and pass them as one reference as follows:
Use range union syntax (X1, Y1, Y2) . Supported in ExceLab 7 only
Use array constant syntax {X1, Y1, Y2}. Supported in Google Sheets only
ExceLab 365 supports only contiguous range input for multiple variables but, for convenience, will accept passing noncontiguous variables as string value "(X1,Y1,Y2)"
bcs A reference to a 2-column array defining the boundary conditions. The first column specifies boundary conditions points, and
the 2nd column specifies corresponding boundary condition formulas. The boundary conditions points must be ordered from left to right.
Boundary condition points may be repeated if multiple boundary conditions are specified at the same location.
A boundary condition formula is arranged with respect to zero on one side. For Example, suppose that the boundary condition (BC) at x0 is y1= y2+1, then the BC formula may be defined as =Y1-Y2-1.
domain a vector defining the start and end values for the spatial domain.
Additional optional data controls the output spatial values in the computed solution as described below.
| Format | Remarks |
|---|---|
| {xs, xe} | The domain [xs, xe] is divided uniformly according to the number of allocated rowsin the output array. |
| {{xs, xe, ndiv} | The domain [xs, xe] is divided uniformly into ndiv subintervals.The allocated output array must have sufficient rows to hold the result. |
| {xs, x1, x2, .., xe} | Solution results are reported for the supplied values only. The allocated output array must have sufficient rows to hold the result. |
m the number of algebraic equations for a DAE system.
For a DAE system, algebraic equations and variables should be listed last in eqns and vars.
rtol relative error tolerance. you may specify a fixed value for all variables, or supply
vector of tolerances for each variable in vars. Default is 1.0e-4.
ctrl a set of key/value pairs for algorithmic control as detailed below.
Description of key/value pairs for algorithmic control
| Key | MAXMESH |
| Default Value | 1000 (Integer) |
| Remarks | Sets an upper bound on the mesh size for the spatial domain. |
| Key | INITMESH |
| Default Value | 7 (Integer) |
| Remarks | Sets the initial mesh size which is refined adaptively during iterations. |
| Key | KORDER |
| Admissible Values (Integer) | 2 ≤ KORDER ≤ 7 |
| Default Value | 4 |
| Remarks | No. of collocation points per mesh subinterval. A higher value will increase computational cost.It may help with a highly oscillating system. |
| Key | LINEAR |
| Admissible Values (Boolean) | True or False |
| Default Value | False |
| Remarks | Set to TRUE if the problem is linear with linear boundary conditions |
| Key | ERROREST |
| Admissible Values (Boolean) | True or False |
| Default Value | False |
| Remarks | Set to true to report global error estimates for the differential variables in the solution output array.The last row of the allocated output array will be reserved for the error estimates. |
| Key | JACSTEP |
| Admissible Values (Real) | 0 < JACSTEP < 0.1 |
| Default Value | The default step is computed dynamically based on machine accuracy, preset limits and function metric. For an order(1) function it is approximately 1.0e-8. |
| Remarks | The default value generally produces accurate approximations; however relaxing the default value may aid convergence on some problems with unknown Jacobian such as parameterized problems. |
| Key | JACSCHEME |
| Admissible Values (Integer) | 1 for First order Euler forward scheme 2 for Second order Euler forward scheme |
| Default Value | 1 |
| Remarks | First order scheme is generally sufficient. |
BVSOLVE is evaluated as an array formula in an allocated range of the spreadsheet. It computes and displays a formatted solution as illustrated in Figure 1 for a system with two state variables and a spatial domain [0 ,1]. The first column displays the spatial points, and the subsequent columns display the corresponding values of the state variables.
| A | B | C | |
| 1 | x | y1 | y2 |
| 2 | 0 | y1(0) | y2(0) |
| 3 | 0.1 | ↓ | ↓ |
| 4 | 0.2 | ||
| .. | ↓ | ||
| 12 | 1 | y1(1) | y1(1) |
| 13 | Rel. Error | error y1 | error y2 |
When allocating a range for BVSOLVE, the following rules apply:
The number of allocated columns should match the number of variables.
The number of allocated rows is arbitrary. It determines the increment for the domain subdivisions (only for display purpose).
You can customize the output spatial points using any of the following formats in argument number 5.
| Format | Remarks |
|---|---|
| {xs, xe} | The domain [xs, xe] is divided uniformly according to the number of allocated rowsin the output array. |
| {{xs, xe, ndiv} | The domain [xs, xe] is divided uniformly into ndiv subintervals.The allocated output array must have sufficient rows to hold the result. |
| {xs, x1, x2, .., xe} | Solution results are reported for the supplied values only. The allocated output array must have sufficient rows to hold the result. |
If the control key ERROREST value is set to True (see examples below), the last row in the allocated output array will display the estimated maximum global error for each variable.
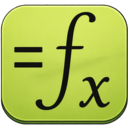
Consider the following 2nd-order nonlinear differential equation in the spatial domain [0,1]
Using standard substitution technique we convert the 2nd-order equation to two 1st-order equations
Working with the named variables x, y, z, and eps for cells
B2:B5, we define the system equations and boundary conditions as shown in Table 1 below.
The colored ranges represent the required input arguments to BVSOLVE. They are: the RHS-side formulas in B7:B8,
the selected system variables B2:B4 (named x, y, z,), and the boundary conditions matrix C2:D3.
| A | B | C | D | |
| 1 | Variables | BCs | ||
|---|---|---|---|---|
| 2 | x | 0 | =u | |
| 3 | u | 1 | =u | |
| 4 | z | |||
| 5 | eps | 0.01 | ||
| 6 | Equations | |||
| 7 | du/dx | =z | ||
| 8 | dz/dx | =(-EXP(u)*z+0.5*PI()*SIN(0.5*PI()*x)*EXP(2*u))/eps |
Next, we evaluate the array formula =BVSOLVE(B7:B8, B2:B4, C2:D3, {0,1}, , , {"ERROREST", True}) in an allocated array G4:I25 and
obtain the solution shown in Table 2 below.
Note that we skip over optional parameters 5 and 6 and pass the key ERROREST in parameter 7 to report global error estimates in the last row of the output array.
The obtained result is plotted in Figure 1.| G | H | I | |
| 4 | x | u | z |
| 5 | 0 | 0 | -9.22395 |
| 6 | 0.05 | -0.3043492 | -3.93625 |
| 7 | 0.1 | -0.44424441 | -1.92551 |
| 8 | 0.15 | -0.51353621 | -0.95066 |
| 9 | 0.2 | -0.54647914 | -0.41601 |
| 10 | 0.25 | -0.55866051 | -0.09636 |
| 11 | 0.3 | -0.55796756 | 0.110589 |
| 12 | 0.35 | -0.5486075 | 0.256436 |
| 13 | 0.4 | -0.53287428 | 0.368873 |
| 14 | 0.45 | -0.51201677 | 0.463304 |
| 15 | 0.5 | -0.48669581 | 0.548502 |
| 16 | 0.55 | -0.45723449 | 0.629561 |
| 17 | 0.6 | -0.42375759 | 0.709506 |
| 18 | 0.65 | -0.38627075 | 0.790212 |
| 19 | 0.7 | -0.34470297 | 0.872914 |
| 20 | 0.75 | -0.29893093 | 0.958517 |
| 21 | 0.8 | -0.24879048 | 1.047768 |
| 22 | 0.85 | -0.19408162 | 1.14137 |
| 23 | 0.9 | -0.13456902 | 1.240042 |
| 24 | 0.95 | -0.06997994 | 1.344568 |
| 25 | 1 | 0 | 1.455833 |
| 26 | Rel. Errors | 1.87103E-06 | 8.35E-05 |
Using standard substitution technique we convert the 2nd order equation to two 1st order equations
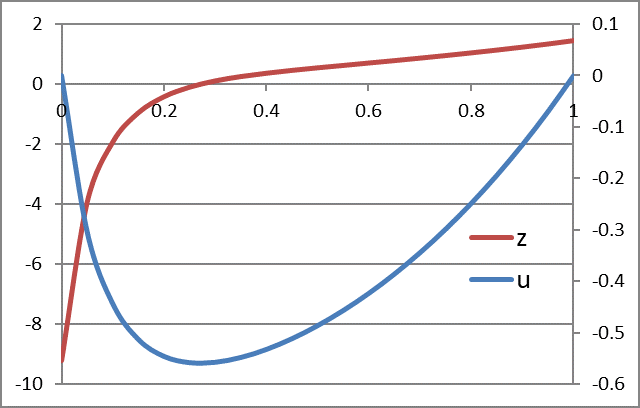
We solve the above stiff system for .
The solution steps are similar to Example 1. We work with the named variables, x, y, z, A, dA, eps corresponding to cells B2:B7 to define the system formulas and boundary condition matrix as shown in Table 1 below.
| A | B | C | D | |
| 1 | Variables | BCs | ||
|---|---|---|---|---|
| 2 | x | 0 | =y-0.9129 | |
| 3 | y | 1 | 1 | =y-0.375 |
| 4 | z | |||
| 5 | A | =1+x^2 | ||
| 6 | dA | =2*x | ||
| 7 | eps | 0.01 | ||
| 8 | Equations | |||
| 9 | dy/dx | =z | ||
| 10 | dz/dx | =((2.4/2-eps*dA)*y*z-z/y-dA/A*(1-0.4/2*y^2))/(eps*A*y) |
Note that we assigned a non zero initial guess value for variable y to avoide the divide by zero error.
Next, we evaluate the array formula =BVSOLVE(B9:B10, B2:B4, C2:D3, {0,1}, , , {"ERROREST", True})
in an allocated array H4:J26. The solver now converges successfully and produces the following result (Table 2) which is plotted in Figure 1.
| H | I | J | |
| 4 | x | y | z |
| 5 | 0 | 0.9129 | 0.835223 |
| 6 | 0.05 | 0.954646 | 0.834019 |
| 7 | 0.1 | 0.996237 | 0.828936 |
| 8 | 0.15 | 1.037468 | 0.819592 |
| 9 | 0.2 | 1.078129 | 0.806201 |
| 10 | 0.25 | 1.118026 | 0.789141 |
| 11 | 0.3 | 1.15699 | 0.7689 |
| 12 | 0.35 | 1.194872 | 0.745969 |
| 13 | 0.4 | 1.231542 | 0.72026 |
| 14 | 0.45 | 1.26676 | 0.684865 |
| 15 | 0.5 | 1.298649 | 0.549927 |
| 16 | 0.55 | 1.305552 | -0.73972 |
| 17 | 0.6 | 1.083584 | -10.5522 |
| 18 | 0.65 | 0.603002 | -2.53229 |
| 19 | 0.7 | 0.547885 | -0.76692 |
| 20 | 0.75 | 0.511759 | -0.68353 |
| 21 | 0.8 | 0.479252 | -0.6188 |
| 22 | 0.85 | 0.449708 | -0.56442 |
| 23 | 0.9 | 0.422687 | -0.51745 |
| 24 | 0.95 | 0.397869 | -0.47612 |
| 25 | 1 | 0.375 | -0.43931 |
| 26 | Rel. Errors | 8.33E-07 | 0.000237 |
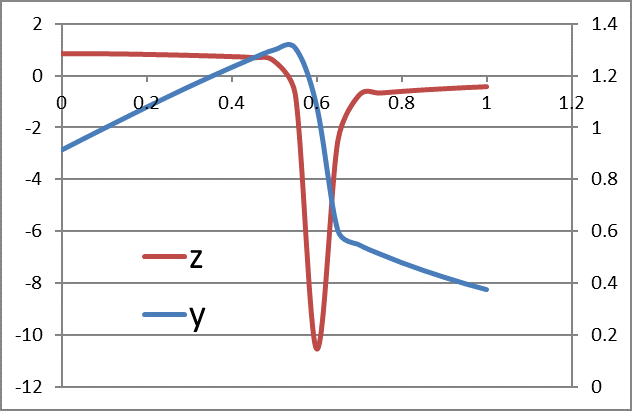
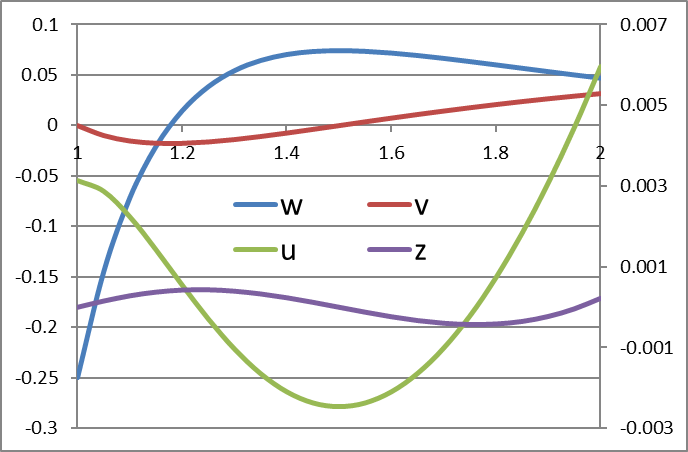
This equation models a uniformly loaded beam of variable stiffness simply supported at both ends.
Using standard substitution technique we convert the 4th order equation to four 1st order equations.
Let
The equivalent boundary conditions are
The solution procedure is similar to Example 1 above. Working with the named variables x,u,v,w and z for cells B2:B6, we define the system equations and boundary conditions as shown in Table 1 below.
| A | B | C | D | |
| 1 | Variables | BCs | ||
|---|---|---|---|---|
| 2 | x | 1 | =z | |
| 3 | u | 1 | =v | |
| 4 | v | 2 | =z | |
| 5 | w | 2 | =v | |
| 6 | z | |||
| 7 | Equations | |||
| 8 | dw/dx | =(1-6*x^2*w-6*x*v)/x^3 | ||
| 9 | dv/dx | =w | ||
| 10 | du/dx | =v | ||
| 11 | dz/dx | =u |
To obtain the solution, We evaluate the array formula
=BVSOLVE(B8:B11, B2:B6, C2:D5, {1,2}, , , {"ERROREST", True}) in allocated array H4:L26.
The results are shown in Table 2 and plotted in Figure 1 below.
| H | I | J | K | L | |
| 4 | x | w | v | u | z |
| 5 | 1 | -0.5 | 1.55242E-30 | 0.017132 | 0 |
| 6 | 1.05 | -0.33011 | -0.02051609 | 0.016584 | 0.000847162 |
| 7 | 1.1 | -0.20832 | -0.03380919 | 0.0152 | 0.001644528 |
| 8 | 1.15 | -0.12078 | -0.04191665 | 0.013289 | 0.002358447 |
| 9 | 1.2 | -0.05787 | -0.04629629 | 0.011071 | 0.002968346 |
| 10 | 1.25 | -0.0128 | -0.048 | 0.008704 | 0.003463059 |
| 11 | 1.3 | 0.019257 | -0.04779245 | 0.006302 | 0.003838168 |
| 12 | 1.35 | 0.041773 | -0.04623279 | 0.003947 | 0.004094076 |
| 13 | 1.4 | 0.057268 | -0.04373178 | 0.001695 | 0.004234597 |
| 14 | 1.45 | 0.067583 | -0.04059207 | -0.00042 | 0.004265921 |
| 15 | 1.5 | 0.074074 | -0.03703704 | -0.00236 | 0.004195851 |
| 16 | 1.55 | 0.077746 | -0.03323151 | -0.00412 | 0.00403324 |
| 17 | 1.6 | 0.079346 | -0.02929688 | -0.00568 | 0.003787576 |
| 18 | 1.65 | 0.079432 | -0.02532209 | -0.00704 | 0.003468679 |
| 19 | 1.7 | 0.078423 | -0.02137187 | -0.00821 | 0.003086471 |
| 20 | 1.75 | 0.076635 | -0.01749271 | -0.00918 | 0.002650819 |
| 21 | 1.8 | 0.074303 | -0.01371742 | -0.00996 | 0.002171412 |
| 22 | 1.85 | 0.071605 | -0.01006851 | -0.01056 | 0.001657686 |
| 23 | 1.9 | 0.068677 | -0.00656072 | -0.01097 | 0.00111876 |
| 24 | 1.95 | 0.065617 | -0.00320302 | -0.01121 | 0.0005634 |
| 25 | 2 | 0.0625 | 1.73472E-18 | -0.01129 | -1.0842E-19 |
| 26 | Rel. Errors | 3.17E-07 | 4.16988E-08 | 5.59E-09 | 8.15553E-10 |
We can easily study the effect of the beam support locations. We solve the same problem but with the beam supported at left end and center (x=1 and x=1.5) with the right end free. The only required change to the problem setup is to change the values of the boundary points in cells C4 and C5 in Tabe 1 from 2 to 1.5. We re-run the solver and obtain the new solution plotted below.
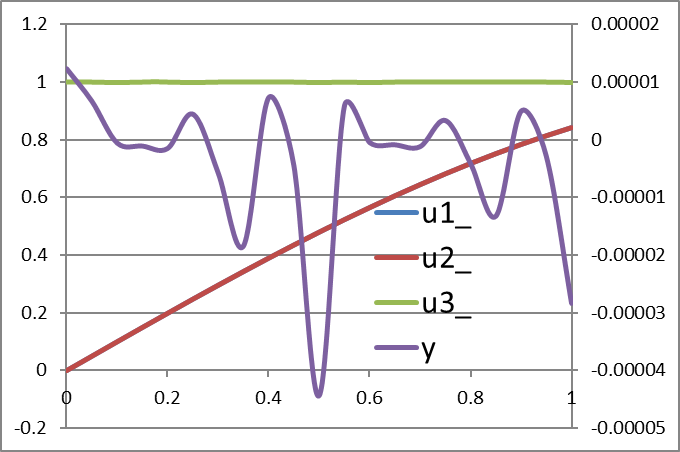
With boundary conditions
For small values of , this problem has the following solution
(See Ascher and Spiteri. Collocation software for boundary value differential-algebraic equations. SIAM Journal on Scientific Computing. Volume 15 938-952. 1995)Working with the named variables x, u1_, u2_, u3_, y and eps for cells B2:B7, we define the system equations and boundary conditions as shown in Table 1 below.
| A | B | C | D | |
| 1 | Variables | BCs | ||
|---|---|---|---|---|
| 2 | x | 0 | =u1_-SIN(0) | |
| 3 | u1_ | 0 | =u3_-1 | |
| 4 | u2_ | 1 | =u2_-SIN(1) | |
| 5 | u3_ | |||
| 6 | y | |||
| 7 | eps | 0.001 | ||
| 8 | Equations | |||
| 9 | du1/dx | =(eps+u2_-SIN(x))*y+COS(x) | ||
| 10 | du2/dx | =COS(x) | ||
| 11 | du3/dx | =y | ||
| 12 | 0 | =(u1_-SIN(x))*(y-EXP(x)) |
To obtain the solution, We evaluate the array formula
=BVSOLVE(B9:B12, B2:B6, C2:D4, {0,1}, 1) in allocated array H4:L26
and obtain the results shown in Table 2 below.
Note that We used optional argument 5 to tell BVSOLVE that the last equation in B9:B12 is an algebraic equation.
| H | I | J | K | L | |
| 4 | x | u1_ | u2_ | u3_ | y |
| 5 | 0 | 0 | 0 | 1 | 1.238E-05 |
| 6 | 0.05 | 0.049979 | 0.049979 | 1 | 6.752E-06 |
| 7 | 0.1 | 0.099833 | 0.099833 | 1 | -4.951E-07 |
| 8 | 0.15 | 0.149438 | 0.149438 | 1 | -1.035E-06 |
| 9 | 0.2 | 0.198669 | 0.198669 | 1 | -1.459E-06 |
| 10 | 0.25 | 0.247404 | 0.247404 | 1 | 4.503E-06 |
| 11 | 0.3 | 0.29552 | 0.29552 | 1 | -5.653E-06 |
| 12 | 0.35 | 0.342898 | 0.342898 | 1 | -1.840E-05 |
| 13 | 0.4 | 0.389418 | 0.389418 | 1 | 7.336E-06 |
| 14 | 0.45 | 0.434966 | 0.434966 | 1 | -4.392E-06 |
| 15 | 0.5 | 0.479426 | 0.479426 | 1 | -4.436E-05 |
| 16 | 0.55 | 0.522687 | 0.522687 | 1 | 5.825E-06 |
| 17 | 0.6 | 0.564642 | 0.564642 | 1 | -4.189E-07 |
| 18 | 0.65 | 0.605186 | 0.605186 | 1 | -8.164E-07 |
| 19 | 0.7 | 0.644218 | 0.644218 | 1 | -1.141E-06 |
| 20 | 0.75 | 0.681639 | 0.681639 | 1 | 3.401E-06 |
| 21 | 0.8 | 0.717356 | 0.717356 | 1 | -4.072E-06 |
| 22 | 0.85 | 0.75128 | 0.75128 | 1 | -1.321E-05 |
| 23 | 0.9 | 0.783327 | 0.783327 | 1 | 4.991E-06 |
| 24 | 0.95 | 0.813416 | 0.813416 | 1 | -2.817E-06 |
| 25 | 1 | 0.841471 | 0.841471 | 1 | -2.832E-05 |
BVSOLVE is based on the COLDAE collocation method with adaptive mesh refinement.