An optimal control problem is typically concerned with finding optimal control functions (or policies) that achieve optimal trajectories for a set of controlled differential state variables. The optimal trajectories are decided by a constrained dynamical optimization problem, such that a cost functional is minimized or maximized subject to certain constraints on state variables and the control functions. Mathematically, an optimal control problem may be stated as follows:
Find the control functions ![]() and the corresponding state
variables
and the corresponding state
variables ![]() which
which
minimize or maximize |
|
|---|---|
|
|
(1) |
subject to |
|
|
|
(2) |
with initial conditions |
|
|
|
(3) |
and optional final conditions and bounds |
|
|
|
(4) |
|
|
(5) |
In the formulation (1)-(5), the generally nonlinear H and G are scalar functions, whereas F, Q, and S are vector-valued functions.
Common forms of Q and S are
![]() and
and ![]() ,
respectively. The matrix M in (2) offers an optional coupling of the states' temporal derivatives by a mass matrix which may be singular.
If M is singular, the equation system (2) is differential algebraic, or DAE. Furthermore, T,
which denotes the final time, may be fixed or free.
,
respectively. The matrix M in (2) offers an optional coupling of the states' temporal derivatives by a mass matrix which may be singular.
If M is singular, the equation system (2) is differential algebraic, or DAE. Furthermore, T,
which denotes the final time, may be fixed or free.
Below, we describe the general steps for employing IVSOLVE and QUADXY with Excel Solver for solving the optimal control problem (1)-(5). To simplify the discussion, we shall assume a single control function, u(t). Extension to multiple controls is straightforward and is demonstrated by the examples. In practice, there are three systematic tasks:
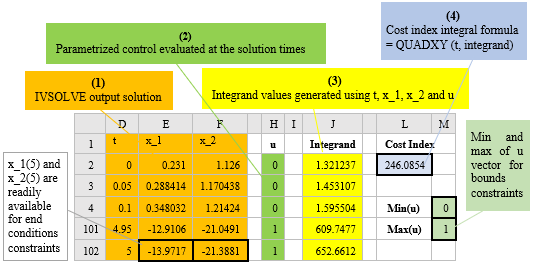
Excel maintains dependency hierarchy, and updates all information whenever a change occurs. Any modification to the design parameters by Excel Solver triggers reevaluation of the inner IVSOLVE solution, the dependent control and integrand columns, the objective, and any constraint formulas in the proper order. Excel Solver always receives up-to-date values for the objective and constraints whenever it alters the design variables values.
Rapid Solution of Optimal Control Problems by a Functional Spreadsheet Paradigm: A Practical Method for the Non-Programmer. Math. Comput. Appl. 2018, 23, 54.
Novel Spreadsheet Direct Method for Optimal Control Problems. Math. Comput. Appl., 23, 6, 2018.