=PDSOLVE(eqns, vars, lbc, rbc, xdom, tdom, [options])
Use
PDSOLVE to solve a system of partial differential equations the following form:
(the system can have as many equations as needed)
where , ,
Initial value for each variable ui is required.
General nonlinear boundary conditions can be specified at left and right ends of the system spatial domain
[xs,xe].
Generally, for each equation
fi in the system: none, one or two boundary conditions are required depending on the order of the equation.
eqns a reference to the system formulas (f1, f2,..).
vars a reference to the system variables in the following order (
t, x, u1, u2,.. ,
u1,x, u2,x,..,
u1,xx, u2,xx,..
). The state variables (u1, u2,..)
must be assigned initial conditions. An initial condition can be a constant or function of the spatial variable x.
All the variables and derivatives must be defined in the order listed above in
vars regardless if they are used in the equations or not.
Variables order must be consistent with equations order. For example, given this order (t, x, u1, u2,.. ) implies ∂u1/∂t = f1, ∂u2/∂t = f2 and so forth.
lbc a reference to the left boundary condition formulas for each equation in the system. Use the string "NA" to indicate an equation has no left boundary condition.
The number of left boundary conditions must equal the number of equations in
eqns. Use the string "NA" to indicate an equation has no left boundary condition.
A boundary condition formula is arranged with respect to zero on one side. For Example, suppose that the boundary condition (BC) is u1= u2+1, then the BC formula may be defined as =U1-U2-1.
rbc a reference to the right boundary condition formulas for each equation in the system.
The number of right boundary conditions must equal the number of equations in
eqns. Use the string "NA" to indicate an equation has no right boundary condition.
xdom a vector defining the start and end values for the spatial domain as well as the desired solution output spatial values.
| Format | Remarks |
|---|---|
| {xs, xe} | The domain [xs, xe] is divided uniformly according to the allocated output array size. |
| {xs, xe, ndiv} | The domain [xs, xe] is divided uniformly into ndiv subintervals. |
| {xs, x1, x2, .., xe} | Solution results are reported for the supplied values only. |
tdom a vector defining the start and end values for the time interval as well as the desired solution output time values.
| Format | Remarks |
|---|---|
| {ti, tf} | The interval [ti, tf] is divided uniformly according to the allocated output array size. |
| {ti, tf, ndiv} | The interval [ti, tf] is divided uniformly into ndiv subintervals. |
| {ti, t1, t2, .., tf} | Solution results are reported for the supplied values only. |
tol controls the absolute and relative error tolerances for temporal integration algorithm.
Default values are 1.0e-4 for relative tolerance and 1.0e-6 for absolute tolerance. Various formats are permitted as described below.
| Format | Remarks |
|---|---|
| rtol | Relative tolerance. Absolute tolerance value is set to rtol/100. Fixed for all variables. |
| {rtol, atol} | Relative and absolute tolerance values. Fixed for all variables |
| vector of rtoli | custom relative tolerance for each system variable. Absolute tolerance is set to rtoli/100. |
| two-column array of {rtoli, atoli} | custom relative and absolute tolerances for each system variable. |
ctrl a set of key/value pairs for algorithmic control as detailed below.
Description of key/value pairs for algorithmic control
| Key | NDRVOUT |
| Admissible Values (Integer) |
|
| Default Value | 0 |
| Remarks | The allocated results array must have sufficient columns to hold output. |
| Key | FORMAT |
| Admissible Values (String) |
|
| Default Value | XCOL1 |
| Remarks | XCOL1 format is convenient to plot snapshots of solution variables at a desired time values. TCOL1 format is convenient to plot transient views of solution variables at a desired spatial locations. See Output Format section for more detail. |
| Key | ALGOR |
| Admissible Values (String) | ADAMS, BDF, RADAU5 |
| Default Value | BDF |
| Remarks | Use ADAMS for smooth problems, BDF or RADAU5 for stiff problems. |
| Key | MAXORDBDF |
| Admissible Values (Integer) | 2 ≤ MAXORDBDF ≤ 5 |
| Default Value | 5 |
| Remarks | Maximum order for BDF. A higher value will increase computational cost. |
| Key | MAXORDADAMS |
| Admissible Values (Integer) | 2 ≤ MAXORDADAMS ≤ 12 |
| Default Value | 12 |
| Key | MAXSTEPS |
| Default Value | 100000 (Integer) |
| Remarks | Sets an upper bound on the maximum number of integration steps that can be carried out. |
| Key | INITSTEP |
| Default Value | 1.0e-5 (Real) |
| Remarks | The step size is quickly adapted. A small value is recommended if the system has fast initial transients. |
| Key | STEPLIMIT |
| Default Value | Unbounded (Real) |
| Remarks | By setting a limit, accuracy may be improved at the expense of speed. |
| Key | NNODES |
| Default Value | 50 (Integer) |
| Remarks | Number of mesh nodes for the spatial domain. This value has direct impact on computational cost. |
| Key | KORDER |
| Admissible Values (Integer) | 2 ≤ KORDER ≤ 7 |
| Default Value | 4 |
| Remarks | Number of collocation points per mesh subinterval. Higher values have direct impact on computational cost. |
| Key | JACSTEP |
| Admissible Values (Real) | 0 < JACSTEP < 0.1 |
| Default Value | The default step is computed dynamically based on machine accuracy, preset limits and function metric. For an order(1) function it is approximately 1.0e-8. |
| Remarks | The default value generally produces accurate approximations; however relaxing the default value may aid convergence on some problems with unknown Jacobian such as parameterized problems. |
| key | JACSCHEME |
| Admissible Values (Integer) | 1 for First order Euler forward scheme 2 for Second order Euler forward scheme |
| Default Value | 1 |
| Remarks | First order scheme is generally sufficient. |
To illustrate PDSOLVE output layout, we consider a 2-equation system with the following variables
(t, x, u1, u2, u1,x, u2,x, u1,xx, u2,xx)
The snapshot view is the default format. It allows you to easily plot snapshot views for the variables at desired time points. In this format, the solution is laid out as shown in Table 1. Output spatial points are listed in the first column starting at row 3, whereas output time points are listed in blocks in the first row starting at column 2 with variables names listed in the second row.
| A | B | C | D | E | F | G | H | .. | |
| 1 | t → | t0 | t0 | t1 | t1 | t2 | t2 | .. | tf |
| 2 | x ↓ | u1 | u2 | u1 | u2 | u1 | u2 | .. | u2 |
| 3 | xs | ||||||||
| 4 | x1 | u2(x1,t0) | |||||||
| 5 | x2 | ||||||||
| .. | .. | ||||||||
| N | xe |
The spatial and time domain are divided uniformly according to the number of allocated rows and columns for the output array.
You can control x and t values by specifying your own step or custom values in parameters 4 and 5
for PDSOLVE.
If you allocate a larger array than needed, unused rows and columns will be filled with zeros.
You can find out the minimum array size needed by evaluating PDSOLVE formula initially in one cell.
We can request to report 1st and 2nd derivative variables using the key NDRVOUT with value 1 or 2. Table 2 shows the modified layout with NDRVOUT value set to 1, in which values for u1,x, and u2,x are also included.
| A | B | C | D | E | F | G | H | I | J | .. | |
| 1 | t → | t0 | t0 | t0 | t0 | t1 | t1 | t1 | t1 | .. | tf |
| 2 | x ↓ | u1 | u2 | u1,x | u2,x | u1 | u2 | u1,x | u2,x | .. | u2,x |
| 3 | xs | ||||||||||
| 4 | x1 | ||||||||||
| 5 | x2 | u1(x2,t1) | |||||||||
| .. | .. | ||||||||||
| N | xe |
In this format, the roles of x and t are interchanged. Output time points are displayed in the first column, whereas spatial points are displayed in the first row. This format allows you to easily plot transient views of the variables at desired spatial points.
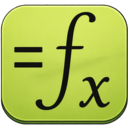
This problem models heat transfer across a slab of thickness 1 which is insulated at the right side (x=1). The slab is initially at 0 degrees temperature. At time equals zero, the left side of the slab (x=0) is brought to 100 degrees. We compute the temperature distribution in the slab at various times.
We solve the heat equation for the following configuration
| Time period | t ∈ [0,1] |
|---|---|
| Spatial range | 0 ≤ x ≤ 1 |
| Parameter | k = 1 |
| Initial condition | |
| Left boundary condition | |
| Right boundary condition |
Working with named variables t, x, u, ux, uxx corresponding to cells B2:B6,
we define the input arguments to PDSOLVE as shown in Table 1, including the system equation,
left and right boundary conditions formulas, and the initial value for u.
| A | B | C | D | |
| 1 | Variables | Parameters | ||
|---|---|---|---|---|
| 2 | t | k | 1 | |
| 3 | x | |||
| 4 | u | =IF(x=0,100,0) | ||
| 5 | ux | |||
| 6 | uxx | |||
| 7 | Equations | Left Bc | Right Bc | |
| 8 | du/dt | =k*uxx | =u-100 | =ux |
Next, we evaluate the array formula =PDSOLVE(B8, B2:B6, C8, D8, {0,1}, {0,1,2})
in allocated array G8:J30 and obtain the
default snapshot-view formatted solution shown in Table 2. Figure 1 plots snapshot views of the
temperature profiles at three time points.
The first argument B8 is a reference to the system RHS formula. the 2nd argument is a reference to the system variables. Alternatively, we could pass the equivalent defined names by combining them with Excel union operator as follows (t, x, u, ux, uxx) in argument 2. The 3rd and 4rth arguments are references to the left and right boundary conditions formulas.
We used Excel array constant syntax, {}, to pass the spatial domain [0, 1] in argument 5, and the time domain [0,1] in argument 6. Note that we have requested to report just 2 divisions in the output for the time interval [0,1] by using one of allowed formats for argument 6.
| G | H | I | J | |
| 8 | t | 0 | 0.5 | 1 |
| 9 | x | u | u | u |
| 10 | 0 | 100 | 100 | 100 |
| 11 | 0.05 | 0 | 97.09061 | 99.15264 |
| 12 | 0.1 | 0 | 94.19917 | 98.31051 |
| 13 | 0.15 | 0 | 91.34352 | 97.47881 |
| 14 | 0.2 | 0 | 88.54128 | 96.66268 |
| 15 | 0.25 | 0 | 85.80973 | 95.86714 |
| 16 | 0.3 | 0 | 83.16573 | 95.09712 |
| 17 | 0.35 | 0 | 80.62557 | 94.35736 |
| 18 | 0.4 | 0 | 78.20491 | 93.65242 |
| 19 | 0.45 | 0 | 75.91868 | 92.98665 |
| 20 | 0.5 | 0 | 73.78095 | 92.36414 |
| 21 | 0.55 | 0 | 71.8049 | 91.78874 |
| 22 | 0.6 | 0 | 70.00271 | 91.26397 |
| 23 | 0.65 | 0 | 68.38546 | 90.79306 |
| 24 | 0.7 | 0 | 66.96312 | 90.37892 |
| 25 | 0.75 | 0 | 65.74445 | 90.02409 |
| 26 | 0.8 | 0 | 64.73694 | 89.73074 |
| 27 | 0.85 | 0 | 63.94682 | 89.50069 |
| 28 | 0.9 | 0 | 63.37894 | 89.33534 |
| 29 | 0.95 | 0 | 63.03681 | 89.23573 |
| 30 | 1 | 0 | 62.92253 | 89.20245 |
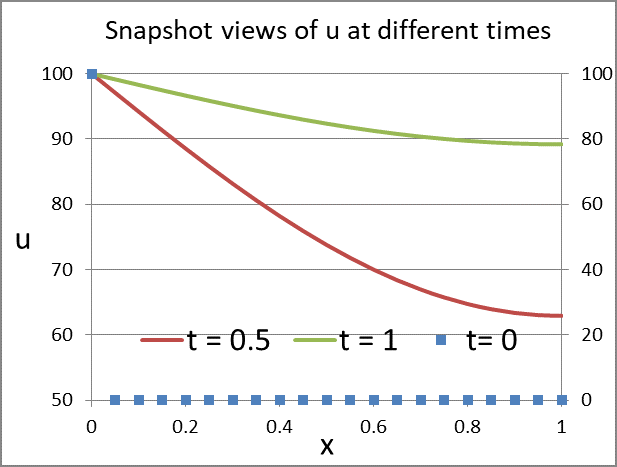
We can change the solution layout to display a transient format using the key FORMAT by evaluating the formula
=PDSOLVE(B8, B2:B6, C8, D8, {0,1}, {0,1}, , {"FORMAT", "TCOL1"}) in array k4:O26. In this format, the locations
of the spatial and time points are swapped as shown in Table 3. This permits easy plotting of transient views as shown in Figure 2.
Note that we skipped over argument 7, and specified the optional key/value pair in argument 8 using a convenient array constant.
| k | L | M | N | O | |
| 4 | x | 0 | 0.25 | 0.75 | 1 |
| 5 | t | u | u | u | u |
| 6 | 0 | 100 | 0 | 0 | 0 |
| 7 | 0.05 | 100 | 42.91949834 | 1.7783 | 0.313101 |
| 8 | 0.1 | 100 | 57.6237003 | 9.872125 | 5.069309 |
| 9 | 0.15 | 100 | 64.9427299 | 19.33831 | 13.57766 |
| 10 | 0.2 | 100 | 69.79061325 | 28.37773 | 22.76939 |
| 11 | 0.25 | 100 | 73.55257239 | 36.5845 | 31.45587 |
| 12 | 0.3 | 100 | 76.70668442 | 43.90968 | 39.32101 |
| 13 | 0.35 | 100 | 79.43829067 | 50.40811 | 46.33273 |
| 14 | 0.4 | 100 | 81.83335844 | 56.16036 | 52.55249 |
| 15 | 0.45 | 100 | 83.94479409 | 61.24727 | 58.05647 |
| 16 | 0.5 | 100 | 85.80973399 | 65.74445 | 62.92253 |
| 17 | 0.55 | 100 | 87.45722654 | 69.72003 | 67.22546 |
| 18 | 0.6 | 100 | 88.91220564 | 73.23462 | 71.03141 |
| 19 | 0.65 | 100 | 90.19820122 | 76.34145 | 74.39453 |
| 20 | 0.7 | 100 | 91.3353407 | 79.08748 | 77.36648 |
| 21 | 0.75 | 100 | 92.3413588 | 81.51442 | 79.99204 |
| 22 | 0.8 | 100 | 93.23124058 | 83.6594 | 82.31287 |
| 23 | 0.85 | 100 | 94.01741268 | 85.55562 | 84.36516 |
| 24 | 0.9 | 100 | 94.71177628 | 87.23199 | 86.18001 |
| 25 | 0.95 | 100 | 95.32502319 | 88.71406 | 87.78445 |
| 26 | 1 | 100 | 95.86714337 | 90.02409 | 89.20245 |
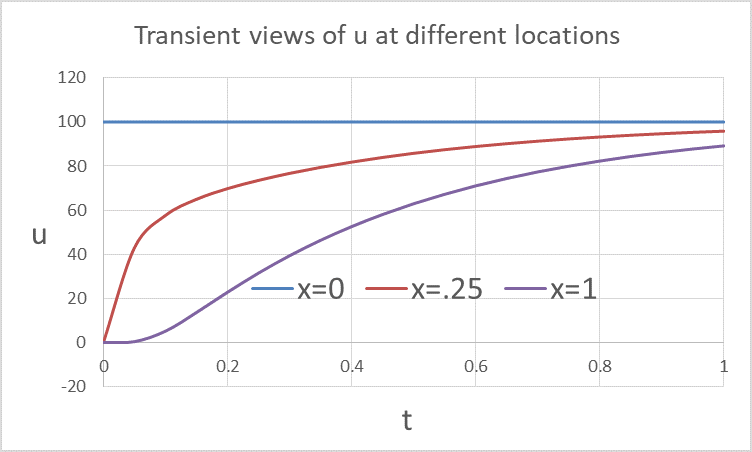
We can also request to output the derivative variables in the result using the key NDRVOUT. For example, to include
ux in the output, we can evaluate the formula
=PDSOLVE(B8, B2:B6, C8, D8, {0,1}, {0,1,2}, , {"NDRVOUT", 1}) in array A10:G32. The results
are shown in Table 4 and Figure 3.
You can supply multiple control keys separated by commas using the constant array format as shown, or you can define them in a 2-column array and pass its address or name.
| A | B | C | D | E | F | G | |
| 10 | t | 0 | 0 | 0.5 | 0.5 | 1 | 1 |
| 11 | x | u | ux | u | ux | u | ux |
| 12 | 0 | 100 | 0 | 100 | -58.2477 | 100 | -16.9647 |
| 13 | 0.05 | 0 | 0 | 97.09061 | -58.068 | 99.15264 | -16.9123 |
| 14 | 0.1 | 0 | 0 | 94.19917 | -57.5301 | 98.31051 | -16.7555 |
| 15 | 0.15 | 0 | 0 | 91.34352 | -56.6371 | 97.47881 | -16.4953 |
| 16 | 0.2 | 0 | 0 | 88.54128 | -55.3948 | 96.66268 | -16.1333 |
| 17 | 0.25 | 0 | 0 | 85.80973 | -53.8108 | 95.86714 | -15.6716 |
| 18 | 0.3 | 0 | 0 | 83.16573 | -51.895 | 95.09712 | -15.1134 |
| 19 | 0.35 | 0 | 0 | 80.62557 | -49.6592 | 94.35736 | -14.4618 |
| 20 | 0.4 | 0 | 0 | 78.20491 | -47.1173 | 93.65242 | -13.7212 |
| 21 | 0.45 | 0 | 0 | 75.91868 | -44.2851 | 92.98665 | -12.896 |
| 22 | 0.5 | 0 | 0 | 73.78095 | -41.18 | 92.36414 | -11.9914 |
| 23 | 0.55 | 0 | 0 | 71.8049 | -37.8213 | 91.78874 | -11.0131 |
| 24 | 0.6 | 0 | 0 | 70.00271 | -34.2296 | 91.26397 | -9.96694 |
| 25 | 0.65 | 0 | 0 | 68.38546 | -30.4271 | 90.79306 | -8.85955 |
| 26 | 0.7 | 0 | 0 | 66.96312 | -26.4373 | 90.37892 | -7.69767 |
| 27 | 0.75 | 0 | 0 | 65.74445 | -22.2846 | 90.02409 | -6.48848 |
| 28 | 0.8 | 0 | 0 | 64.73694 | -17.9947 | 89.73074 | -5.23936 |
| 29 | 0.85 | 0 | 0 | 63.94682 | -13.594 | 89.50069 | -3.95803 |
| 30 | 0.9 | 0 | 0 | 63.37894 | -9.10946 | 89.33534 | -2.6523 |
| 31 | 0.95 | 0 | 0 | 63.03681 | -4.56882 | 89.23573 | -1.33025 |
| 32 | 1 | 0 | 0 | 62.92253 | -1.8E-12 | 89.20245 | -1.8E-12 |
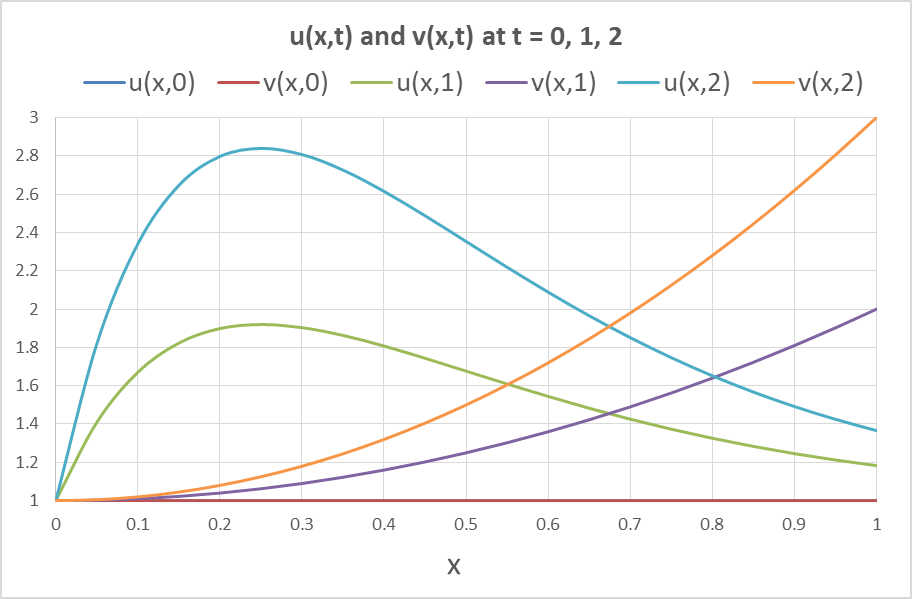
The following coupled nonlinear system has known analytical solution for the following configuration:
| Time period | t ∈ [0,2] |
|---|---|
| Spatial range | 0 ≤ x ≤ 1 |
| Initial values |
|
| Left boundary condition |
|
| Right boundary condition |
|
The exact solution1 is given by:
1Madsen N.K., Sincovec R.F. Software for partial differential equations, in Numerical Methos for Differential Systems, L. Lapidus, W.E. Schiesser eds., Acedemic Press, New York (1976))
We solve this system next with PDSOLVE
Working with the named variables t, x, u, v, ux, vx, uxx, vxx, we define the input arguments to PDSOLVE as shown in Table 1, including the system equations, left and right boundary conditions formulas, and the initial values for u and v.
| A | B | C | D | |
| 1 | Variables | |||
|---|---|---|---|---|
| 2 | t | ux | ||
| 3 | x | vx | ||
| 4 | u | 1 | uxx | |
| 5 | v | 1 | vxx | |
| 6 | Equations | Left Bc | Right Bc | |
| 7 | u,t | =vx*ux+(v-1)*uxx+(16*x*t-2*t-16*(v-1))*(u-1)+10*x*EXP(-4*x) | =u-1 | =ux-3*(1-u) |
| 8 | v,t | =vxx+ux+4*u-4+x^2-2*t-10*t*EXP(-4*x) | =v-1 | =vx-0.2*(u-1)*EXP(4) |
To obtain the solution, we evaluate the formula =PDSOLVE(B7:B8, (B2:B5,D2:D5), C7:C8, D7:D8, {0,1}, {0,1})
in allocated array A10:G32 and obtain the solution shown in Table 2. The numerical results are virtually identical to the analytical solution
with shown precision. Snapshots of u and v profiles at different times are plotted in Figure 1.
Excel Tip. We used Excel union operator (Ref1, Ref2, ..), to combine all the system variables (B2:B5,D2:D5) into one reference in argument 2. The union operator preserves the order of the variables which is required. This is equivalent to grouping the named variables in the required order (t, x, u, v, ux, vx, uxx, vxx) in argument 2.
| A | B | C | D | E | F | G | |
| 10 | t | 0 | 0 | 1 | 1 | 2 | 2 |
| 11 | x | u | v | u | v | u | v |
| 12 | 0 | 1 | 1 | 1 | 1 | 1 | 1 |
| 13 | 0.05 | 1 | 1 | 1.409366 | 1.0025 | 1.818731 | 1.005 |
| 14 | 0.1 | 1 | 1 | 1.67032 | 1.01 | 2.340639 | 1.02 |
| 15 | 0.15 | 1 | 1 | 1.823218 | 1.0225 | 2.646435 | 1.045 |
| 16 | 0.2 | 1 | 1 | 1.898658 | 1.04 | 2.797316 | 1.08 |
| 17 | 0.25 | 1 | 1 | 1.919699 | 1.0625 | 2.839397 | 1.125 |
| 18 | 0.3 | 1 | 1 | 1.903583 | 1.09 | 2.807166 | 1.18 |
| 19 | 0.35 | 1 | 1 | 1.863089 | 1.1225 | 2.726179 | 1.245 |
| 20 | 0.4 | 1 | 1 | 1.807586 | 1.16 | 2.615172 | 1.32 |
| 21 | 0.45 | 1 | 1 | 1.743845 | 1.2025 | 2.48769 | 1.405 |
| 22 | 0.5 | 1 | 1 | 1.676676 | 1.25 | 2.353353 | 1.5 |
| 23 | 0.55 | 1 | 1 | 1.609417 | 1.3025 | 2.218835 | 1.605 |
| 24 | 0.6 | 1 | 1 | 1.544308 | 1.36 | 2.088616 | 1.72 |
| 25 | 0.65 | 1 | 1 | 1.482778 | 1.4225 | 1.965557 | 1.845 |
| 26 | 0.7 | 1 | 1 | 1.42567 | 1.49 | 1.851341 | 1.98 |
| 27 | 0.75 | 1 | 1 | 1.373403 | 1.5625 | 1.746806 | 2.125 |
| 28 | 0.8 | 1 | 1 | 1.326098 | 1.64 | 1.652195 | 2.28 |
| 29 | 0.85 | 1 | 1 | 1.283673 | 1.7225 | 1.567346 | 2.445 |
| 30 | 0.9 | 1 | 1 | 1.245914 | 1.81 | 1.491827 | 2.62 |
| 31 | 0.95 | 1 | 1 | 1.212522 | 1.9025 | 1.425045 | 2.805 |
| 32 | 1 | 1 | 1 | 1.183156 | 2 | 1.366313 | 3 |
Burgers equation arises in various topics including fluid mechanics in particular.
We solve this system for the following configuration and compare our numerical results with published exact Fourier solution
| Time period | t ∈ [0,3] |
|---|---|
| Spatial range | 0 ≤ x ≤ 1 |
| Parameter | μ = 0.1 and .01 |
| Initial value | |
| Left boundary condition | |
| Right boundary condition |
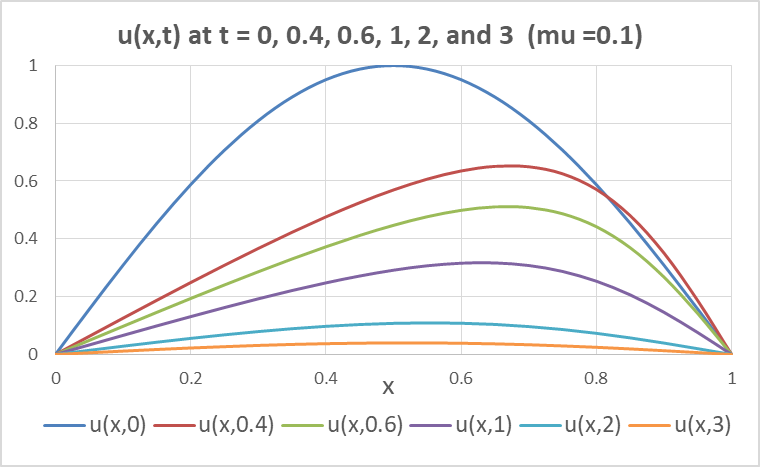
Working with named variables t, x, u, ux, uxx, we define the input arguments to PDSOLVE as shown in Table 1, including the system equation, left and right boundary conditions formulas, and the initial value for u.
| A | B | C | D | |
| 1 | Variables | Parameters | ||
|---|---|---|---|---|
| 2 | t | mu | 0.1 | |
| 3 | x | |||
| 4 | u | =SIN(PI()*x) | ||
| 5 | ux | |||
| 6 | uxx | |||
| 7 | Equations | Left Bc | Right Bc | |
| 8 | du/dt | =mu*uxx-u*ux | =u | =u |
Next, we evaluate the array formula =PDSOLVE(B8, B2:B6, C8, D8, {0,1}, {0,0.4,0.6,1,2,3}) in allocated array A10:G32 and obtain the solution shown in Table 2.
Note that we have requested to report custom output time points in the interval [0,3] using one of the allowed formats for argument 6.
Figure 1 plots snapshot views of the u at various time points.
| A | B | C | D | E | F | G | |
| 10 | t | 0 | 0.4 | 0.6 | 1 | 2 | 3 |
| 11 | x | u | u | u | u | u | u |
| 12 | 0 | 0 | -1.09849E-19 | -1.76817E-19 | -3.38039E-19 | -6.94334E-19 | -7.66987E-19 |
| 13 | 0.05 | 0.156434 | 0.062967368 | 0.048911187 | 0.033239453 | 0.014479494 | 0.00591558 |
| 14 | 0.1 | 0.309017 | 0.125652393 | 0.09764422 | 0.066311545 | 0.028753611 | 0.011711215 |
| 15 | 0.15 | 0.45399 | 0.187759988 | 0.146009437 | 0.09903539 | 0.042612425 | 0.017267755 |
| 16 | 0.2 | 0.587785 | 0.248967988 | 0.1937925 | 0.131201781 | 0.055837184 | 0.022467765 |
| 17 | 0.25 | 0.707107 | 0.308909449 | 0.240737705 | 0.162555919 | 0.068196653 | 0.027196686 |
| 18 | 0.3 | 0.809017 | 0.367148979 | 0.286525231 | 0.192776238 | 0.079444482 | 0.031344339 |
| 19 | 0.35 | 0.891007 | 0.423149575 | 0.330738977 | 0.221448139 | 0.089318163 | 0.034806865 |
| 20 | 0.4 | 0.951057 | 0.476224634 | 0.372820357 | 0.248031646 | 0.097540284 | 0.037489146 |
| 21 | 0.45 | 0.987688 | 0.52546721 | 0.412001795 | 0.271822782 | 0.103822939 | 0.039307725 |
| 22 | 0.5 | 1 | 0.569646198 | 0.447213154 | 0.291910985 | 0.107876231 | 0.040194162 |
| 23 | 0.55 | 0.987688 | 0.607055139 | 0.476953781 | 0.307137937 | 0.109421761 | 0.04009872 |
| 24 | 0.6 | 0.951057 | 0.635303383 | 0.499131496 | 0.316071605 | 0.108211614 | 0.038994127 |
| 25 | 0.65 | 0.891007 | 0.651049314 | 0.510885043 | 0.317017903 | 0.10405284 | 0.036879198 |
| 26 | 0.7 | 0.809017 | 0.649727143 | 0.508454577 | 0.308107184 | 0.096835993 | 0.033781846 |
| 27 | 0.75 | 0.707107 | 0.625420424 | 0.487238594 | 0.28750007 | 0.086565254 | 0.029761188 |
| 28 | 0.8 | 0.587785 | 0.571236655 | 0.442286995 | 0.253749775 | 0.073385482 | 0.024908229 |
| 29 | 0.85 | 0.45399 | 0.48074178 | 0.369527647 | 0.206311494 | 0.057600781 | 0.019344871 |
| 30 | 0.9 | 0.309017 | 0.350911318 | 0.267818401 | 0.146094008 | 0.039678638 | 0.013220984 |
| 31 | 0.95 | 0.156434 | 0.186022413 | 0.141222145 | 0.075829949 | 0.020235104 | 0.006709534 |
| 32 | 1 | 1.23E-16 | 1.22515E-16 | 1.22515E-16 | 1.22515E-16 | 1.22515E-16 | 1.22515E-16 |
We change the value of mu in D2 from 0.1 to 0.01. Figure 2 shows the updated profiles for u.
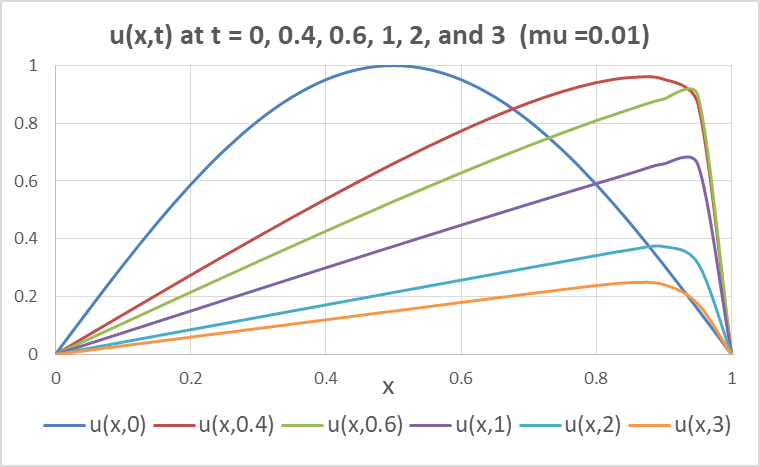
A Fourier-based solution1 values for Burgers equation for two values of μ are listed in Table 3 along with computed values by PDSOLVE.
The results are virtually identical.
1S. Kutluay, A.R. Bahadir, A. Ozdes, Numerical solution of one-dimensional Burgers equation, explicit and exact-explicit finite difference method. Journal of Computational and Applied Mathematics 103 (i 999) 251-261
| x | t | u (μ=0.1) Fourier PDSOLVE | u (μ=0.01) Fourier PDSOLVE |
| 0.25 | 0.6 | 0.24074 0.240737705 | 0.26896 0.268975372 |
| 1 | 0.16256 0.162555919 | 0.18819 0.188198472 | |
| 3 | 0.02720 0.027196686 | 0.07511 0.075115705 | |
| 0.75 | 0.6 | 0.48721 0.487238594 | 0.76724 0.767275326 |
| 1 | 0.28747 0.28750007 | 0.55605 0.556072119 | |
| 3 | 0.02977 0.029761188 | 0.22481 0.224816515 |
PDSOLVE implements the method of lines. Spatial discretization is carried out on a uniform mesh using a standard collocation method.
The resulting implicit ODE system is integrated by any of the algorithms RADAU5, BDF, or ADAMS with adaptive step control.